|
|
|
А.В. Ворон
Практической предпосылкой исследования послужили непосредственные наблюдения и анализ техники движений легкоатлетических упражнений – разбега в прыжковых легкоатлетических дисциплинах, техники спринтерского и барьерного бега. В результате наблюдений нами фиксировалось, что в спринтерском беге, например, в одном из циклов бегового шага (когда бегун произвольно увеличивает длину одного из беговых шагов) – последующий шаг пропорционально короче предшествующего шага, а еще через цикл бегового шага – длиннее. И так далее, колеблясь и закономерно сменяя позиции «волны» до тех пор, пока полностью не стабилизируется динамическая структура движений бега.
Тот же волновой эффект корректирующих влияний на движения мы можем наблюдать при разбеге в легкоатлетических прыжках в момент подготовки к отталкиванию, когда прыгун выполняет предпоследний шаг разбега длиннее завершающего. Этот завершающий шаг, предшествующий непосредственно отталкиванию, вынужденно получается короче предыдущего, а вместе с этим – закономерно быстрее происходит отталкивание – ведь при условии укорочения бегового шага горизонтальная скорость продвижения спортсмена не изменилась. Подобный технический прием в легкоатлетических прыжках имеет практический смысл – он позволяет спортсменам-прыгунам добиться более быстрого, а значит более мощного отталкивания.
Еще один пример можно привести из легкоатлетической дисциплины – барьерного бега. Преодоление барьера, с точки зрения сохранения соразмерности и постоянства структуры системы движений, является возмущающим и отрицательно воздействующим фактором. После преодоления барьера наблюдается «волновая» коррекция структуры бега – на сходе с барьера длительность полетной фазы 1-го шага всегда меньше последующего (2-го), а продолжительность 3-го шага незначительно, но больше 1-го. Подобный «волновой» эффект наблюдается в беге между барьерами на дистанциях 100 (110) и 400 м.
В этой связи мы предполагаем, что подобная «волна» коррекций не сможет своевременно сформироваться посредством механизма сенсорных коррекций ввиду скорости происходящих движений – по дуге обратной связи корректирующий нервный импульс не успевает попасть к работающей мышце – сенсорные коррекции не успевают формироваться в баллистических движениях. Не успевает также сформироваться решение о коррекции движений [2]. В то же время, корректирующее воздействие на структуру баллистических движений легкоатлетических упражнений все же происходит. Разрешение описанных противоречивых положений так же послужило основанием к проведению настоящего исследования.
Исследование проводилось на основе материалов видеосъемки, произведенной на Республиканских соревнованиях «Призы М. Желобовского» (10 июня 2016 г. СК «Олимпиец», г. Минск, ул. Калиновского, 111). В качестве видеокамеры нами использовался цифровой фотоаппарат Canon PowerShot SX 510 HS. Видеозапись велась в режиме скоростной видеосъемки с частотой 240 кадров в секунду. Анализ отснятого материала производился при посредстве программы «Virtual Dub». Объектом исследования стали временные параметры техники ходьбы, бега, отталкивания в прыжках с разбега.
На основе временных параметров движений ходьбы нами были построены соответствующие подограммы (рисунок 1). Каждый из элементов построенных подограмм (в данном случае – опора и перенос ноги), мы отобразили в виде квадратов с катетами, размерностью равной продолжительности элемента ходьбы. Мы разделили по диагонали прямой линией полученный квадрат, в результате чего получили два прямоугольных треугольника. Образованные таким образом гипотенузы двух треугольников элементов подограммы (опоры и переноса) совпали по направлению, а их размерность в отношении друг к другу колебалась в диапазоне 58–62 и 42–38 %, что соответствует в среднем отношению золотой пропорции. Для удобства описания построенной нами подограммы мы использовали терминологию геометрии. В частности, – терминологию геометрических преобразований, относящихся к группе простейших геометрических преобразований – аффинных преобразований (центральное подобие или гомотетия). Таким образом (преобразованием подобия) нами преобразован треугольник А В О, обозначающий опору в ходьбе, в треугольник A1 В1 О, обозначающий перенос ноги катетом О В1. При этом преобразовании расстояния между точками А О и В О изменяются в одно и то же число раз: произвольные точки А и В треугольника при этом преобразовании переходят в точки A1 и В1 другого треугольника с центром гомотетии О и коэффициентом подобия равным отношению золотой пропорции (0,618 в одном случае и 1,618 – в другом) (рисунок 1).
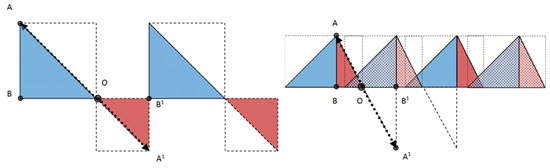
Рисунок 1 – Блок-схема элементов структурной оппозиции ходьбы в периоды опоры и переноса (слева) и двойного шага ходьбы (справа)
Для описания динамической системы локомоций человека нами введено понятие «элемент структурной оппозиции», которое характеризует диалектическое взаимоотношение между структурными элементами системы. Элементы структурной оппозиции образованы точками катетов А В, В О и точками гипотенузы АО преобразуемой фигуры, а так же точками катетов А1 В1, В1 О и точками гипотенузы А1О преобразованной фигуры (см. рисунок 1). Поэтому нами определены два типа элементов структурной оппозиции – преобразуемый элемент структурной оппозиции и преобразованный. По размерности оба элемента могут быть по отношению друг к другу как большим, так и меньшим элементом с коэффициентом подобия равным отношению золотой пропорции (0,618 или соответственно 1,618). Больший и меньший элемент структурной оппозиции может выступать в качестве преобразующего, так и преобразуемого элемента. Преобразующий элемент оппозиции в технике ходьбы и бега определяет соподчиненность элементов в структуре техники движений.
Катеты преобразуемых фигур соразмерны времени опоры (рисунок 1, слева) и времени амортизации (катет с точками А В) и отталкивания (катет с точками В О) (рисунок 1, справа).
В ходьбе структурные связи между элементами оппозиции проявляются в двух случаях: когда фаза опоры одной ноги является большим преобразующим элементом по отношению к переносу другой (рисунок 1, слева); когда фаза отталкивания одной ноги является меньшим преобразующим элементом по отношению к преобразованному элементу при амортизации другой ноги (рисунок 1, справа). Если преобразование при гомотетии в первом случае может характеризоваться коэффициентом подобия равным 0,618, то во втором случае – 1,618. Таким образом, в ходьбе нами выделено два вида структурных связей с размерностью золотой пропорции – опоры и переноса, отталкивания одной ноги и амортизации другой.
В беге преобразующим элементом оппозиции является отталкивание, преобразуемым – фаза полета. Аналогично блок-схеме рисунка 1 нами представлена блок-схема элементов структурной оппозиции периодов опоры и полета в беге, где точки катетов А В и В О фигуры преобразующего элемента оппозиции образуют соразмерные времени проявления фаз амортизации и отталкивания отрезки этой фигуры (рисунок 2). Аналогичен и механизм преобразования фигур. И если в ходьбе и беге катеты преобразующих элементов структурной оппозиции пропорционально изменялись в связи с изменениями в скорости передвижения – один катет уменьшался при соразмерном увеличении другого – то при построении подограмм отталкивания в прыжках с разбега элементы структурной оппозиции (в данном случае – это меньший преобразующий элемент амортизации с точками А О и больший преобразованный элемент отталкивания с точками О А1) сохраняли размерность или были очень близки к отношению золотой пропорции. Иначе говоря, соотношение времени амортизации к отталкиванию было в среднем равно отношению золотой пропорции (рисунок 2, справа). Точки О В могут характеризовать величину усилий произведенных спортсменом при отталкивании.
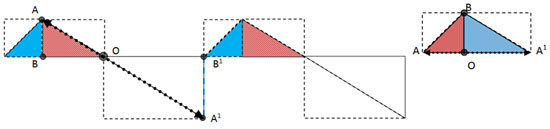
Рисунок 2 – Блок-схема элементов структурной оппозиции периодов опоры и полета бега (слева) и отталкивания прыжка (справа)
Все многообразие преобразований элементов структурных оппозиций ходьбы (ось О Y) и бега (ось О Х) можно наглядно представить в виде такого геометрического преобразования как гиперболический поворот (рисунок 3). Этот вид афинных преобразований преобразует фигуры вдоль двух осей (производя их сжатие-растяжение) и не меняет площади прямоугольника со сторонами параллельными осям координат (в нашем случае – прямоугольного треугольника –элемента структурной оппозиции с коэффициентом растяжения 1,618 и соответственно сжатия – 0,618). Движение по оси О Y может характеризовать преобразования структурных оппозиций ходьбы по мере уменьшения скорости передвижения и по оси О Х – соответствующие преобразования в беге по мере увеличения скорости передвижения.
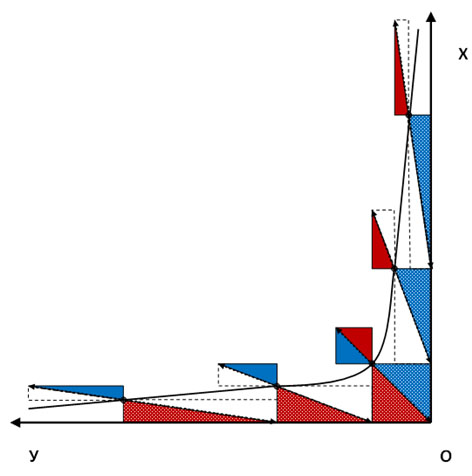
Рисунок 3 – Блок-схема элементов структурной оппозиции преобразованных способом гиперболического поворота
1. Для описания динамической системы локомоций человека нами введено понятие «элемент структурной оппозиции». Колебания размерности преобразующих элементов структурной оппозиции приводит к соразмерному изменению подчиненных элементов преобразуемых элементов структурной оппозиции, которые преобразованы с коэффициентом подобия равным отношению золотой пропорции (0,618 или 1,618).
2. Принцип преобразования структур в таких динамических системах как локомоции человека основан на геометрических способах преобразования, в частности, – преобразований, относящихся к группе простейших геометрических преобразований – преобразование подобия (центральное подобие или гомотетия) и сжатие вдоль двух осей (гиперболический поворот).
3. Механизм компенсации возникающих отклонений в движениях локомоций на основе взаимодействия структурных элементов оппозиции является одним из принципов регуляции локомоторных автоматизмов при одновременной и согласованной работе сенсорных коррекций. В таком случае еще более определенно звучат высказывания Н.А. Бернштейна: «…движение не есть цепочка деталей, а структура, дифференцирующаяся на детали» [1, с. 340]; «…Биодинамическая ткань живого движения – локомоций – оказалась наполненной огромным количеством закономерных и стойких деталей» [1, с. 339].
1. Бернштейн, Н.А. Физиология движений и активность / Н.А. Бернштейн. – М.: Наука, 1990. – 495 с.
2. Чхаидзе, Л.В. Об управлении движениями человека / Л.В. Чхаидзе. – М.: Физкультура и спорт, 1970. – 136 с.
А.В. Ворон, Структурная гармония локомоций человека // «Академия Тринитаризма», М.,
|
|